Most deep sea creatures propel themselves by moving their fins. However, bioinspired robots designed to move this way are not efficient. The propulsion force is feeble and it is difficult to make them turn. Enter the squid – jet propulsion swimmers of the deep sea! By sucking water in and quickly contracting its soft body, the squid squirts a powerful jet of water to move at incredible speeds when it wants to.
Bioinspired robo-squid
Scientists from Jiangxi University of Science and Technology used folded waterproof paper to recreate the soft body of a squid and developed a robot that can jet away like one. Bear in mind though that the actual robot had rigid components too. For instance, DC motors powered the driving mechanism while water exited through 3D printed spouts. That being said, this design is a big improvement from previous attempts to make squid-like robots which used rigid systems for the body as well.
How it operates
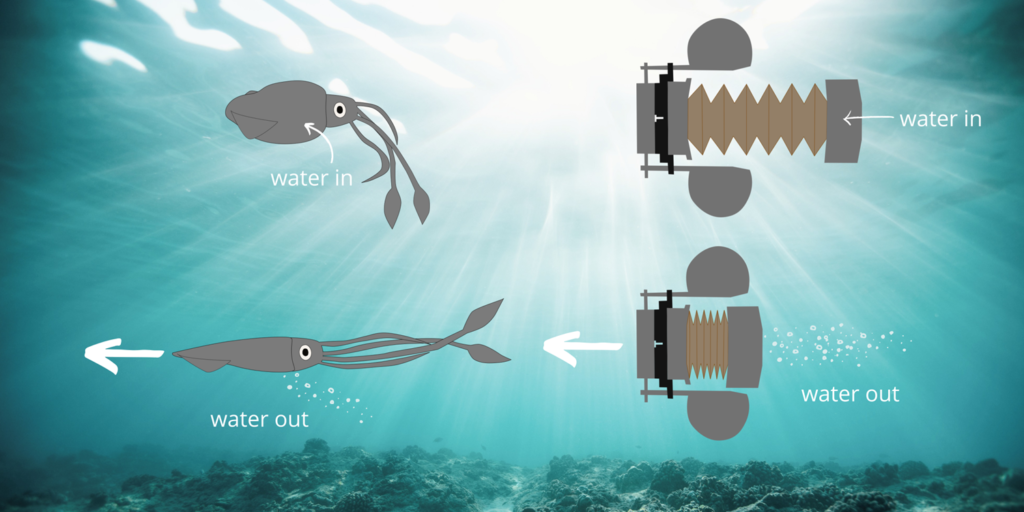
The robot generates thrust when the folded paper body stretches and collapses rapidly. When stretched, pressure inside reduces, drawing water in. Contraction increases pressure within, pushing water out and thrusting the robot forward. The robot could turn left and right thanks to fins connected to the driving mechanism. There is some math behind how these fins were designed, and if you are interested, read the full article here.
Testing performance
The researchers plugged the robot to a power source, attached force and altitude sensors, and recorded its movements underwater. This confirmed the pulsed-jet mechanism that thrusts the robot forward fast, as fast as 10cm/s. They also found that flexible fins turned out to be better than stiff ones when it comes to maneuvering the robot.
Bioinspired robot design is tough
Folded structures can simulate a squid’s propulsion mechanism. However, it is important to remember that this particular robot seems to be resting on the floor of the tank during tests. I would imagine practical use of these robots requiring not just left to right maneuverability underwater, but free movement in 3D space. How will it perform in strong water currents? How noisy will it be? As good an attempt this is at mimicking nature, it highlights how far we really are from truly mimicking nature.